|
�����\�еĭh��������ϵ�y���Է֞��������ϵ�y���֙C����ϵ�y������������ϵ�y��Ƕ��ʽ����ϵ�y�ȡ�
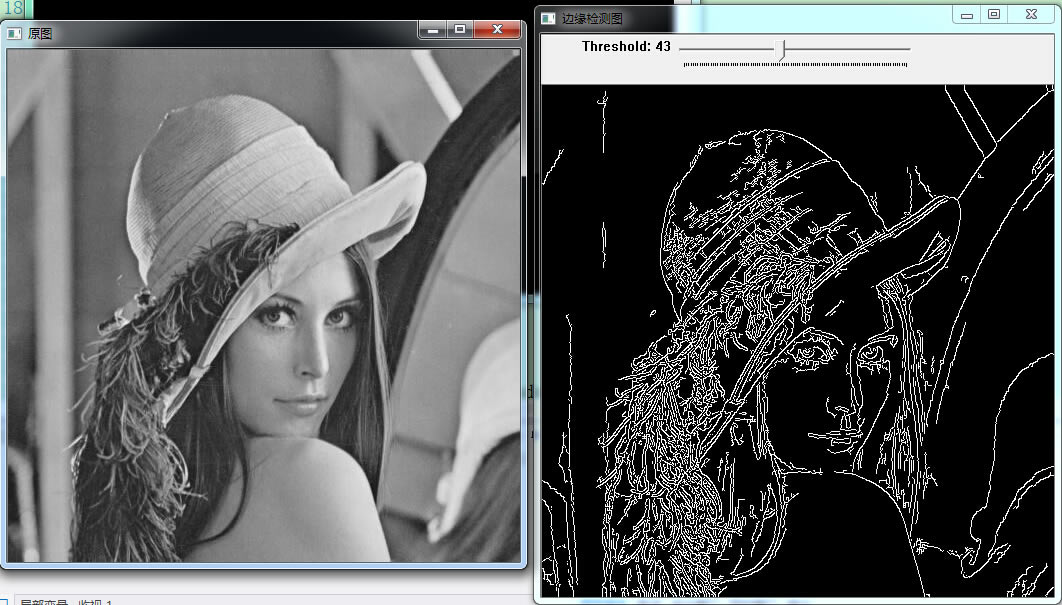
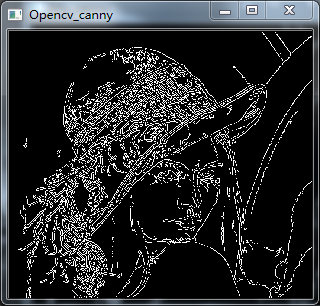
��: �У��҂���ҪӑՓʹ��sobel���Ӻ�Laplace׃�Q�M��߅���z�y. ���У���Ҫʹ�Ì��ݶȴ�С�M���ֵ���ԫ@�ö�ֵ߅���D��ķ���. �ڈD���У�߅��ͨ��������Ҫ��ҕ�X��Ϣ������������ճ��D��Ԫ�ص�݆��. ���ǣ��Hʹ�ú��εĶ��M��߅���D���Ѓɂ���Ҫȱ�c: ʹ�ô˷����z�y����߅��̫���@��ζ�����y�ʴ_��λ����. ���y�ҵ��@�ӵ��ֵ��ԓ�ֵ���ԙz�y�������͵���Ҫ߅��������ͬ�r������̫��ε�߅��. �@�ɂ����}���DZ�����ʹ�õ�Canny�㷨ԇ�D��Q�Ć��}.
Canny�\���ͨ������sobel�\������M��Ҳ����ʹ�������ݶ��\������������˼����ʹ�Ãɂ���ͬ���ֵ���_����Щ�c����݆�����Ա㌢�ɂ��ֵ�քe���֫@�Ãɂ�߅���N�D. �˺�Canny�㷨���ɂ�߅���N�D�M����һ�������ɡ���ѡ�݆���D. ��������B�m��߅���c���t�����ֵ�D���е�߅���c�c���ֵ�D���е�߅�����B��Ȼ�������ֵ�D���е�߅���c. �@�Nʹ���p�ֵ�@ȡ���M�ƈD��IJ��ԷQ��Ŝ��ֵ. Canny�㷨���x��ɂ��ֵ��һ��Ҫ��. �����^�͵��ֵ�������������J��������@�D��݆��������߅������. �^���ֵ�����Ñ�ԓ�Ƕ��x����������Ҫ݆����߅�������ґ��ų����Ю���ֵ. ��OpenCV�У����FCanny�㷨�ĺ�����cv :: Canny. ԓ�������{�÷�������:
��Ҫ���a���£�ֱ�ӌ������ӵ���Ҫ������
��:
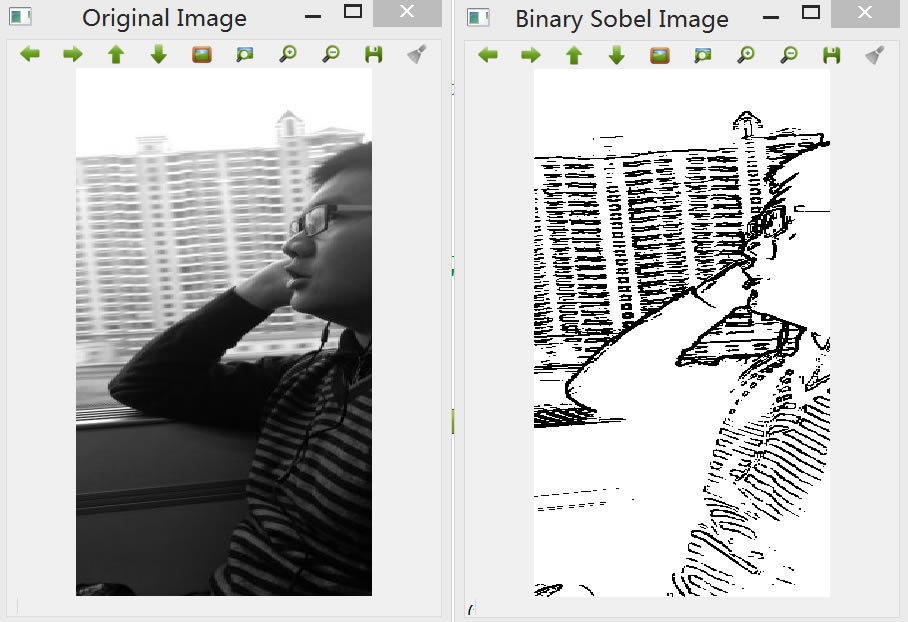
������Sobel�\�����ݔ��Ч��:
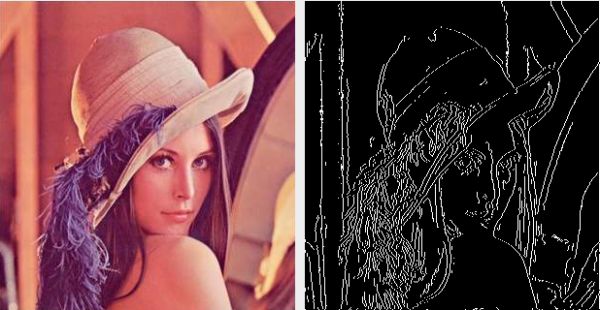
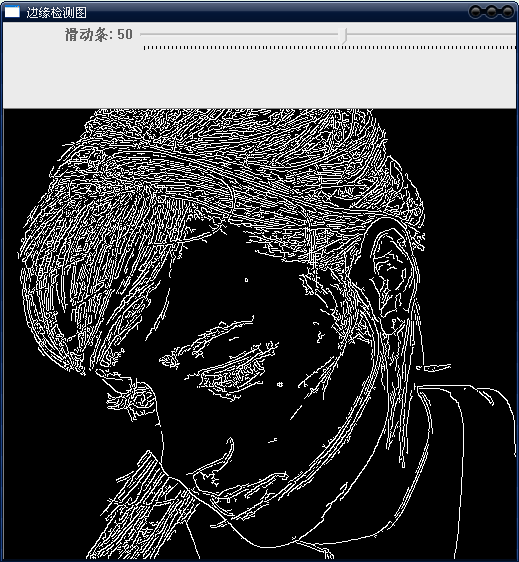
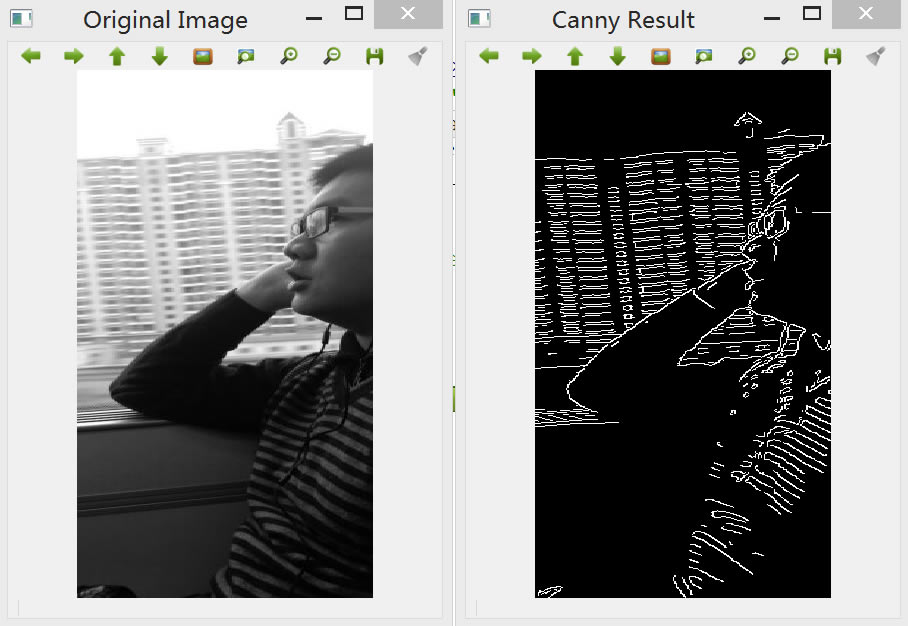
�cSobel�\������canny����߅���z�yԭ����Canny�\������ԫ@�ø�����߅�������Canny�㷨ʹ���������ԁ���߈D���|��. ��ʹ�Ü����ֵ֮ǰcanny����߅���z�yԭ������ȥ���ݶȴ�С�������ֵ������߅���c. �@�ӣ��u׃�ķ���ʼ�K��ֱ��߅�������ԓ�����ϵľֲ��u׃���ֵ������݆��������ߵ��c. Canny�㷨�m���ڲ�ͬ����. �䅢�����S������ͬ���F���ض�Ҫ���M���{�������R�e��ͬ��߅������. ���⣬Canny�㷨�����S����{�������@��Ӱ��㷨��Ӌ��r�g����Ч��. ��˹�V�����Ĵ�С: ��һ����ʹ�õ�ƽ���V������ֱ��Ӱ�Canny�㷨�ĽY��. �^С�ĞV�RҲ���a���^�ٵ�ģ������˿��ԙz�y��׃���^С�ļ���. �^��ĞV�RҲ���a�������ģ��Ч��. ���D����^��^���L�ƞ��ض��c���ɫֵ. �@�ӵĽY�����ڙz�y�^���ƽ��߅��������ʺ�߅����������. �ֵ: ʹ�Ãɂ��ֵ��ʹ��һ���ֵ���`������ֵ��Ȼ����һЩ��Ҋ���}. ����ֵ�O�õ�̫�ߣ����ܕ��Gʧ��Ҫ��Ϣ������ֵ̫�ͣ��t��֧��Ϣ�����J������Ҫ��. ���y�o���m�������ЈD���ͨ���ֵ. ��ǰ�]�н��^��C�Č��F����.
|
��ܰ��ʾ��ϲ�g��վ��Ԓ��Ո�ղ�һ�±�վ��
��վ�l����Win7������ϵ�y��Win10�������XP������ϵ�y�H�邀�ˌW���yԇʹ�ã�Ո�����d��24С�r�Ȅh�������������κ��̘I��;����t�����ؓ��Ո֧��ُ�Iܛ����ܛ����
��վ�����YԴȫ�������ھW�j�YԴ,���ַ������ę���,Ո���r֪ͨ�҂�(),�҂������r̎��.
Copyright © 2018-2020 �}��ϵ�y �֙Cվ �P�ڱ�վ