|
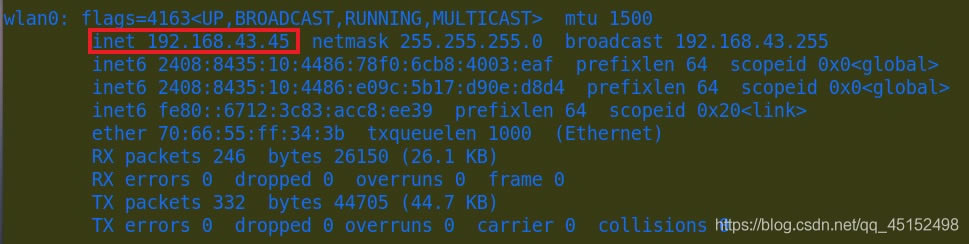
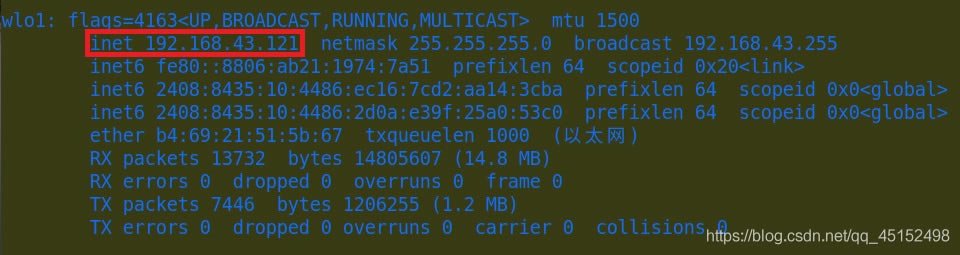
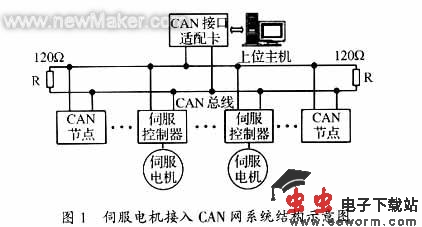
�W�j���ϣ�network failure����ָ����Ӳ���Ć��}��ܛ����©�������������������W�j�o���ṩ�������ջͷ����|���Ġ�B�� ����҂���ʹ��ROS�M�ЙC�����_�l�ĕr�����{ԇ������܇�ĕr��Ӳ���YԴ�����߲���ֱ���M���_�lӋ��r���������������ęC�� ���c�����\���ڲ�ͬ��Ӌ��ƽ�_�ϣ����� ROS ��ֻ���Sһ�� Master���ڶ��Cϵ�y�У�Masterֻ���\����һ�_�C���ϣ������C����Ҫͨ�^SSH�cMasterȡ��ϵ�� �ԃ��_��X������B�ֲ�ʽ���Cͨ�ŵ����ò��E�������C��ucar_mini���ęC��xiaolong-Inspiron-5580�� һ���O��IP��ַ 1. ������Ҫ�_��ROS���Cϵ�y�е�����Ӌ��C����ͬһ���W�j�ϡ� ifconfig �鿴���C��ַ��
ifconfig �鿴�ęC��ַ��
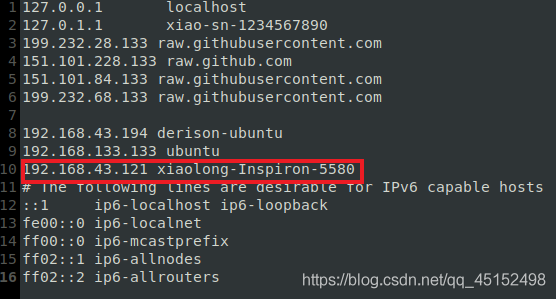
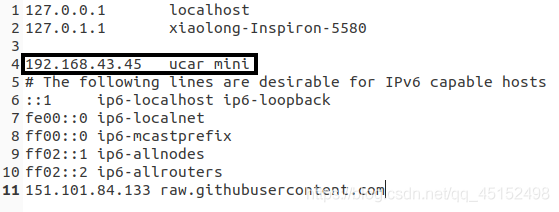
2.�����Cϵ�y/etcĿ��µ�hosts�ļ������ӏęC��IP��ַ�͌�����Ӌ��C����
�ڏ�ϵ�y/etcĿ��µ�hosts�ļ����������C��IP��ַ�͌�����Ӌ��C����
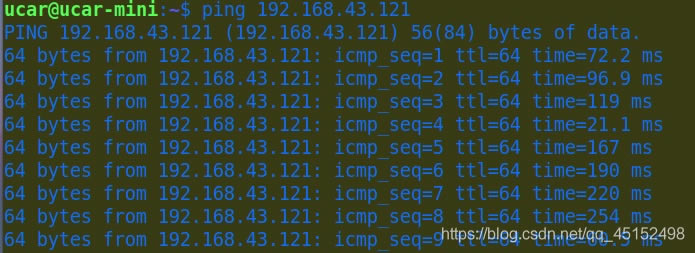
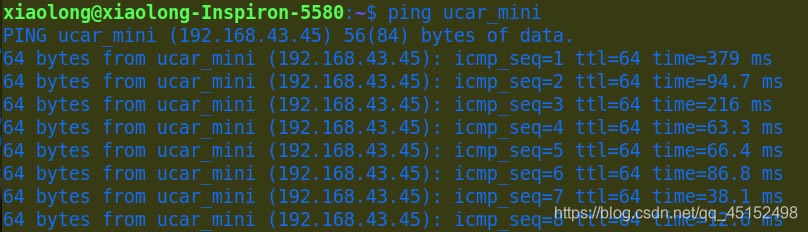
3.�O�úú��ڃ��_��X����ping����yԇ�W�j�Ƿ��Bͨ�� �D�@ʾ�p��W�j��ͨ�o�裬�f���ӾW�jͨ�ś]�І��}�� ������ping���IP�����֣�
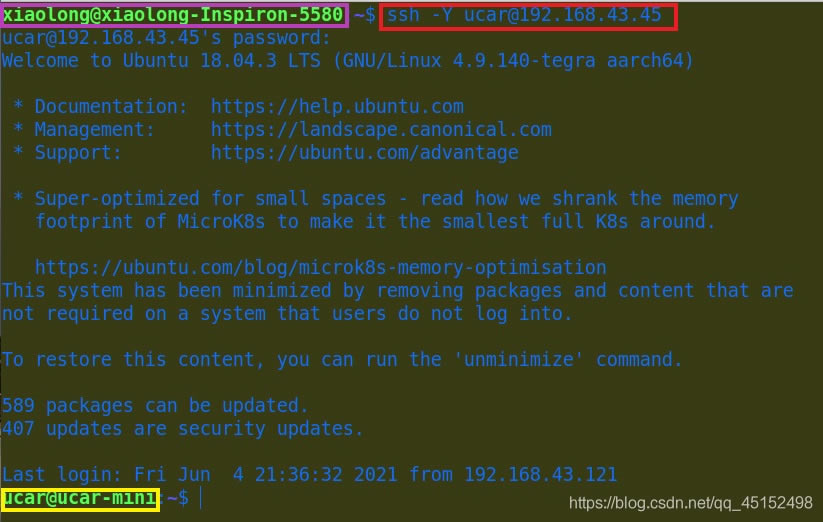
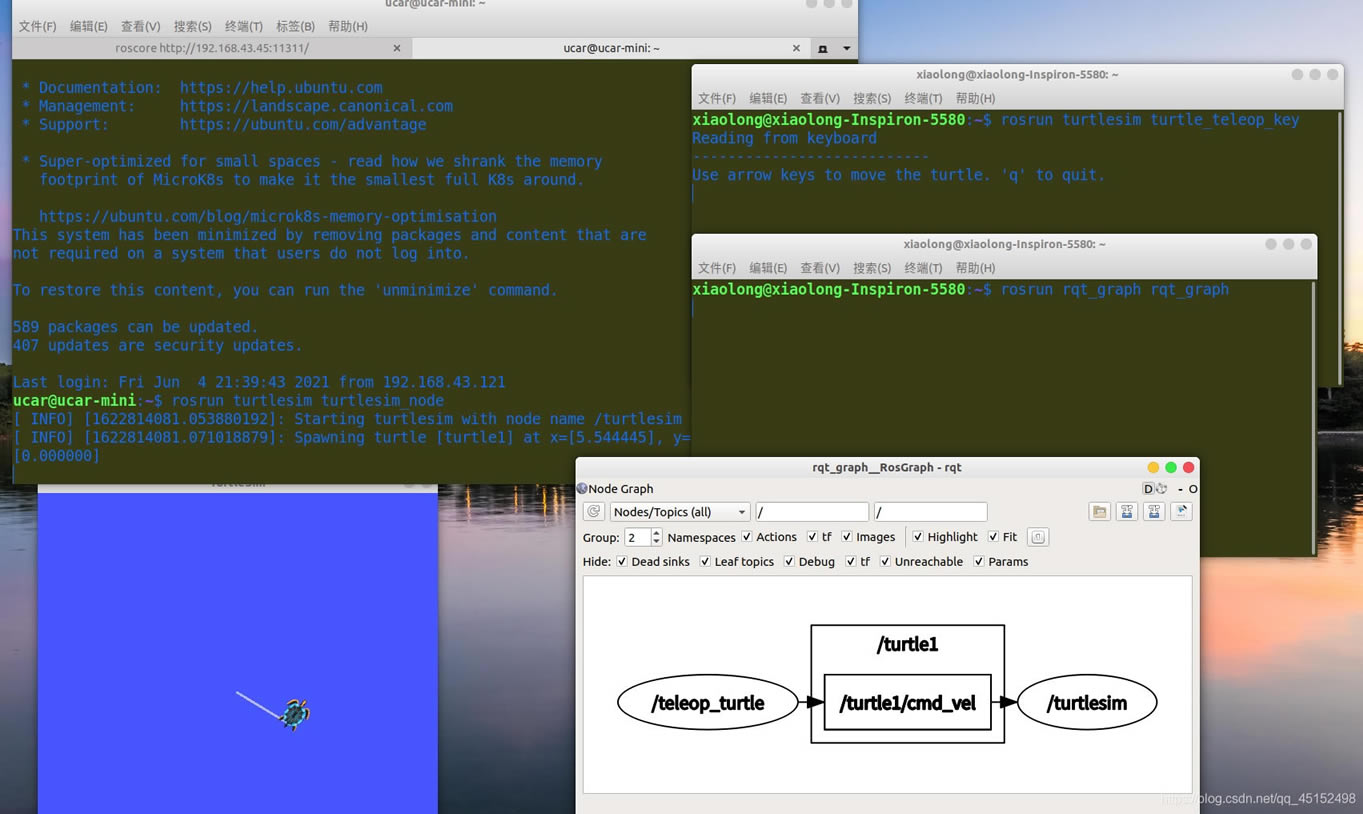
�����O�� ROS_MASTER_URI ���ϵ�y��ֻ����һ��Master������Slave��Ҫ֪��Master��λ�á� ��slave�[�ص�.bashrc�ļ���ctrl+h���_�������������ݣ� ROS_HOSTNAME ���ӏęC��ַ�� ROS_MASTER_URI �������C��ַ�� �������Cͨ�Ŝyԇ 1.�҂�����ͨ�^ssh�ГQ��host�ˁ�����slave�ϵ�host��
2.��host�ˆ���master��С�����c����slave�ˆ���keyboard���c�M�п��ơ� ���@�r������ܕ������X���ܵ�Ӱ푣��l�F������ݔ�����߿���Ч���
�ġ�expansion ���҂���܇�����Ӌ���YԴ���Ǻܺõĕr���҂��������@��ssh�����C�φ���master����slave���M�и��NӋ�㣬rviz��ҕ���ȣ���Ȼ�҂���multi -Ӌ��Cͨ�Ų����ڃ��_Ӌ��C�O�䣩��ͬ�r���҂�߀����ͨ�^NFS��VNC�M���h���{ԇ�� �������ă��ݣ� ��ROS�C�����_�l���`��-������ �����e�`���㣬�gӭ����ָ����
����Խ��Խ��ĘI�Ց����\���ھW�j�ܘ�֮�ϣ����ϾW�j�ij��m����Ч����ȫ���\�У��ɞ�W�j���������R�ľ����� |
��ܰ��ʾ��ϲ�g��վ��Ԓ��Ո�ղ�һ�±�վ��
��վ�l����Win7������ϵ�y��Win10�������XP������ϵ�y�H�邀�ˌW���yԇʹ�ã�Ո�����d��24С�r�Ȅh�������������κ��̘I��;����t�����ؓ��Ո֧��ُ�Iܛ����ܛ����
��վ�����YԴȫ�������ھW�j�YԴ,���ַ������ę���,Ո���r֪ͨ�҂�(),�҂������r̎��.
Copyright © 2018-2020 �}��ϵ�y �֙Cվ �P�ڱ�վ